| Work range |
X-axis:250mm (Moving stroke in right and left)
Y-axis:210mm (Work table moving stroke in back and forth)
Z-axis:70mm
|
| Work area |
250mmX210mm |
| Operation method |
Pulse motor(open loop control) |
| Position accuracy |
Less thanĪŠ0.05 |
| Control speed |
1 to 300mm/sec.(1 to 100mm/sec. under CP control) |
| Max. head weight |
Y axis:5kg Z axis:2kg |
| Control method |
PTP control and CP control |
| System input and output |
Input 4 points, Output 3 point
|
| Interpolation function |
Three dimensional interpolation(Two dimensional interpolation for arc)
|
| Programming |
By direct command through Teaching pendant(option) or by input via MDl |
| Program capacity |
2000 steps |
| Power supply |
AC100 to 120VĪŠ10%, AC200 to 240VĪŠ10% |
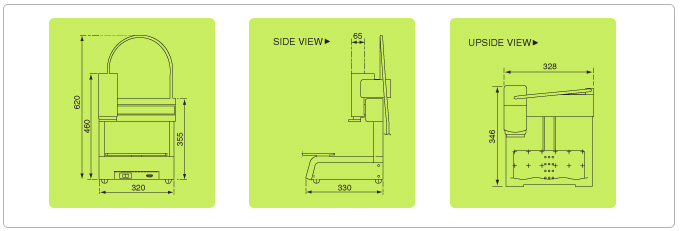
| Overview dimensions |
(W)320X(D)330X(H)460mm |
| Weight |
15kg in approx |
| Standard Accessories |
Switch box 1pc.
Power supply cord 1pc.
Dispenser connecting cable 1pc. |
| Option |
ĪżWhole range of IEI dispensers ĪżTeaching pendant ĪżWork table
ĪżPrecision nozzle fix tool ĪżBarrel fix tool ĪżValve fix tool
ĪżNEO ONE fix tool ĪżNeedle guide tip ĪżStandard head ĪżPrecision head |